|
..:: Pomiar dyspersji polaryzacyjnej ::..
-
metoda oparta na analizie macierzy Jonesa;
-
metoda wykorzystująca sferę Poincarégo;
-
metoda wykorzystująca modulację z przesunięciem fazy;
-
metoda oparta na analizie opóźnienia propagacji impulsu;
-
metoda interferometryczna.
Chciałbym również zaznaczyć, że zjawisko dyspersji polaryzacyjnej
jest zjawiskiem statystycznym. Owa bliższa nieokreśloność tego
parametru,
w przedziale od 0 do 0,5
 ,
spowodowana jest dwójłomnością oraz sprzęganiem wzdłuż całej
długości włókna. Właśnie ta statystyczna natura tego parametru
powoduje, że jest on mierzony z ograniczoną dokładnością. Obecnie
pomiaru PMD można dokonywać w zakresie od 5 fs (f – femto tj. 10-15)
do 10 ps.
W światłowodzie nisko – modowym silnie sprzężonym np. typu
dwójłomnego (HB), gdzie ograniczenie jest statystyczne jest
najsilniejsze, PMD jest mierzona
z dokładnością rzędu 2% tj. PMD > 300 fs. ,
spowodowana jest dwójłomnością oraz sprzęganiem wzdłuż całej
długości włókna. Właśnie ta statystyczna natura tego parametru
powoduje, że jest on mierzony z ograniczoną dokładnością. Obecnie
pomiaru PMD można dokonywać w zakresie od 5 fs (f – femto tj. 10-15)
do 10 ps.
W światłowodzie nisko – modowym silnie sprzężonym np. typu
dwójłomnego (HB), gdzie ograniczenie jest statystyczne jest
najsilniejsze, PMD jest mierzona
z dokładnością rzędu 2% tj. PMD > 300 fs.
Metoda oparta na analizie macierzy Jonesa
Aby ośrodek, w którym rozchodzi się
fala świetlna można było analizować
w oparciu o macierz Jonesa, musi on spełniać następujące założenia
:
· ośrodek musi być
dwójłomny, nieskończenie rozciągły w kierunku prostopadłym do
kierunku padania fali świetlnej;
· fala świetlna musi być
płaska (spolaryzowana liniowo), nieskończenie rozciągła w kierunku
poprzecznym do kierunku propagacji;
· ośrodek dwójłomny musi
wprowadzać różnicę faz pomiędzy falami własnymi (modami
ortogonalnymi) równą  –
czas opóźnienia pomiędzy modami ortogonalnymi. –
czas opóźnienia pomiędzy modami ortogonalnymi.
Analizując teorię propagacji w światłowodach oraz w oparciu o
rozważania
na temat zjawiska dyspersji polaryzacyjnej można jasno stwierdzić,
że powyższe założenia są spełnione, więc zasadne jest analizowanie
światłowodu w oparciu
o macierz Jonesa. Zatem całkowicie spolaryzowaną falę
świetlną można więc przedstawić za pomocą dwuelementowej macierzy
Jonesa wymiaru 2x1. Każdy
z elementów zawiera odpowiednio informację o amplitudzie i fazie
składowych pola. Zmiana składowych pola, spowodowana przejściem
przez jakiś obiekt, określana jest przez mnożenie wektora (macierzy)
fali wejściowej przez macierz opisującą ten obiekt. Macierz
dowolnego elementu optycznego można określić mnożąc trzy wektory
Jonesa fali świetlnej na wyjściu badanego obiektu. Znając
polaryzację fali świetlnej na wejściu badanego obiektu, w bardzo
łatwy sposób możemy wyznaczyć macierz tego obiektu, w szczególności
dla liniowej polaryzacji fal wejściowych, tzn. w takiej sytuacji,
kiedy drgania wektora pola elektrycznego mają ten sam kierunek
(odbywają się w jednej płaszczyźnie).
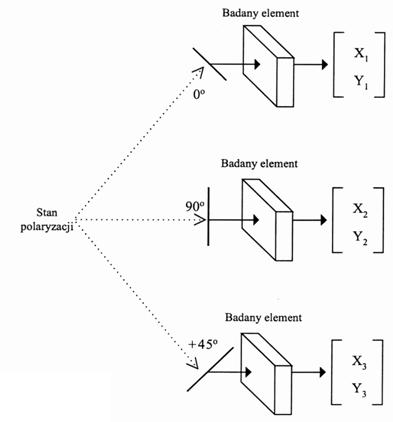
Rys. 4.16
Trzy wektory Jonesa
fali świetlnej na wyjściu badanego obiektu
Można wyróżnić trzy stany polaryzacji
(Rys. 4.16), przy których określa się macierz Jonesa, a mianowicie:
· wektor pierwszy: polaryzacja fali
światła jest liniowa, a drgania rozchodzą się poziomo (kąt skręcania
płaszczyzny jest równy 0o względem poziomu), przy takich
założeniach określamy wektor (macierz Jonesa wymiaru 2x1)
 oraz
współczynnik oraz
współczynnik  ; ;
· wektor drugi: polaryzacja fali świetlnej
jest liniowa, a drgania rozchodzą się pionowo (kąt skręcania
płaszczyzny jest równy 90o względem poziomu), przy takich
założeniach określamy wektor (macierz Jonesa wymiaru 2x1)
 oraz
współczynnik oraz
współczynnik  ; ;
· wektor trzeci: polaryzacja fali
świetlnej jest liniowa, a drgania rozchodzą się skośnie (kat
skręcania płaszczyzny jest równy 45o względem poziomu),
przy takich założeniach określamy wektor (macierz Jonesa wymiaru
2x1)  oraz
współczynnik oraz
współczynnik  ; ;
W oparciu o
wyznaczone wartości współczynników
K1,
K2,
K3,
można określić macierz Jonesa badanego elementu (wymiaru 2x2), która
ma następującą postać:
|
 |
(4.16) |
gdzie:
 ,
C
– stała zespolona związana z amplitudą i fazą sygnału optycznego. ,
C
– stała zespolona związana z amplitudą i fazą sygnału optycznego.
W
praktyce wykorzystujemy dwie wersje metody Jonesa – metodę z pełną
macierzą Jonesa, kiedy musimy uwzględnić fazę fali świetlnej oraz
metodę zredukowaną (uproszczoną), w której fazy światła nie
uwzględniamy. Macierze Jonesa mają wówczas postać:
· pełna macierz Jonesa:
jest zbudowana z
elementów:
Ez – amplituda pola,
Φz
– faza i ma trzy warianty oraz
 –
postać wykładnicza liczby zespolonej (tzw. tożsamość Eulera), –
postać wykładnicza liczby zespolonej (tzw. tożsamość Eulera),
 : :
§
 dla
fali spolaryzowanej liniowo o poziomych drganiach; dla
fali spolaryzowanej liniowo o poziomych drganiach;
§
 dla
fali spolaryzowanej liniowo o pionowych drganiach; dla
fali spolaryzowanej liniowo o pionowych drganiach;
§
 dla
fali spolaryzowanej liniowo o skośnych drganiach; dla
fali spolaryzowanej liniowo o skośnych drganiach;
· zredukowana macierz Jonesa: zbudowana
jest z elementów 0 i 1, gdyż pomijamy w niej fazę, a wektory są w
postaci unormowanej, tzn. każda ze współrzędnych podzielona jest
przez długość wektora, mamy trzy warianty:
§
 dla
fali spolaryzowanej liniowo o poziomych drganiach; dla
fali spolaryzowanej liniowo o poziomych drganiach;
§
 dla
fali spolaryzowanej liniowo o pionowych drganiach; dla
fali spolaryzowanej liniowo o pionowych drganiach;
§
 dla
fali spolaryzowanej liniowo o skośnych drganiach; dla
fali spolaryzowanej liniowo o skośnych drganiach;
Dodatkowo jest jeszcze możliwa
polaryzacja kołowa, tzn. kiedy koniec wektora pola elektrycznego
zakreśla okrąg wokół kierunku rozchodzenia się fali. Spolaryzowaną
kołowo falę można przedstawić jako sumę liniowo spolaryzowanych fal
przesuniętych w fazie o 90o, w których drgania wektora
pola elektrycznego zachodzą w dwóch płaszczyznach ortogonalnych
(prostopadłych) względem siebie. Wówczas macierz Jonesa ma postać:
·
 dla
polaryzacji prawoskrętnej (ujemna orientacja); dla
polaryzacji prawoskrętnej (ujemna orientacja);
·
 dla
polaryzacji lewoskrętnej (dodatnia orientacja). dla
polaryzacji lewoskrętnej (dodatnia orientacja).
Metoda pomiaru parametru dyspersji
polaryzacyjnej w oparciu o macierz Jonesa, polega na:
· wyznaczeniu macierzy Jonesa dla badanego światłowodu
dla kilku długości fali:
λ1,
λ2,
..., λn,
gdzie
 ; ;
· obliczeniu różnicowego opóźnienia grupowego dla fali o
długości
λi,
w oparciu o macierze Jonesa wyznaczone dla blisko siebie leżących
długości fali (λi-n
i λi+n),
równo oddalonych od długości fali
λi.
Dokonujemy tego w oparciu o równość [2]:
|
 |
(4.17) |
gdzie:
τi+n
i τi-n
– opóźnienia grupowe związane z głównymi stanami polaryzacji
odpowiednio dla długości fali
λi+n
i λi-n,
dω
– zmiana częstotliwości optycznej odpowiadająca odległości między
długościami fali
dω = dωi+n
– dωi-n,
ρ1
i ρ2
– wartości własne endomorfizmu
opisanego wzorem:
 ,
przy czym
T
– wyznaczona macierz Jonesa dla fali o długości
λi,
T-1
– macierz odwrotna do macierzy Jonesa; ,
przy czym
T
– wyznaczona macierz Jonesa dla fali o długości
λi,
T-1
– macierz odwrotna do macierzy Jonesa;
Z
równania (4.17) wynika, że omawiana metoda tylko wtedy będzie
poprawna, kiedy macierz Jonesa będzie nieosobliwa (jej wyznacznik
będzie różny od zera), gdyż wtedy będzie można wyznaczyć macierz do
niej odwrotną.
Współczynnik (parametr) dyspersji polaryzacyjnej wyznaczamy
podstawiając w miejsce wartość
 wyznaczoną
na podstawie równania (4.17). wyznaczoną
na podstawie równania (4.17).
Jak
już wspominano wcześniej, współczynnik dyspersji polaryzacyjnej
można wyznaczyć z pewną dokładnością, zatem chciałbym zaznaczyć w
tym miejscu, że na dokładność przeprowadzonego pomiaru z
wykorzystaniem omawianej metody ma wpływ wielkość przedziału
długości fali
dλ = λi+n
- λi-n. Poprawne wyniki uzyskujemy, kiedy
spełniony jest następujący warunek:
|
 |
(4.18) |
gdzie:
 –
maksymalna spodziewana wartość różnicowego opóźnienia grupowego,
c –
prędkość światła w próżni. –
maksymalna spodziewana wartość różnicowego opóźnienia grupowego,
c –
prędkość światła w próżni.
Rys. 4.17 Schemat
aparatury do pomiaru dyspersji polaryzacyjnej
w oparciu analizie macierzy Jonesa
Źródło
światła, które jest używane przy pomiarze, powinno być
wąskopasmowe i przestrajalne (przestrajalny laser), jeżeli nie
dysponujemy takim źródłem możemy wykorzystać kilka różnych, ale
musimy zadbać o podobne warunki sprzężenia światłowodu ze źródłem.
Metoda
wykorzystująca sferę Poincarégo
Poza macierzą Jonesa
polaryzację światła można opisywać za pomocą wektora Stokesa oraz
sferą Poincarégo, która z kolei jest trójwymiarowym zobrazowaniem
elementów składowych wektora Stokesa. Zatem przed omówieniem metody
wykorzystującej sferę Poincarégo do wyznaczenia wartości
współczynnika dyspersji polaryzacyjnej, postaram się przybliżyć
sposób wyznaczania wektora Stokesa, co w konsekwencji daje sferę
Poincarégo.
Stany polaryzacji
sygnału optycznego są reprezentowane przez składowe (elementy)
wektora Stokesa, które w literaturze można również spotkać pod nazwą
parametrów wektora Stokesa.
Elementami charakterystycznymi dla teorii Stokesa opisu polaryzacji
fali świetlnej są:
· wektor Stokesa:
jest macierzą składającą się z czterech wierszy i jednej kolumny
(macierz wymiaru 4x1):

gdzie:
S0
– całkowita moc sygnału optycznego (tzw. miara albo norma wektora
Stokesa),
S1
– moc optyczna fali spolaryzowanej liniowej przy drganiach
poziomych, pomniejszona o moc optyczną fali spolaryzowanej liniowo
przy drganiach pionowych,
S2
– moc optyczna fali
polaryzowanej liniowo przy drganiach skośnych (kąt skręcania
płaszczyzny polaryzacji wynosi +45o), pomniejszona o moc
optyczną fali spolaryzowanej liniowo przy drganiach skośnych (kąt
skręcania płaszczyzny polaryzacji wynosi –45o),
S3
– moc optyczna fali spolaryzowanej kołowo – prawoskrętnie,
pomniejszona o moc fali spolaryzowanej kołowo – lewoskrętnie;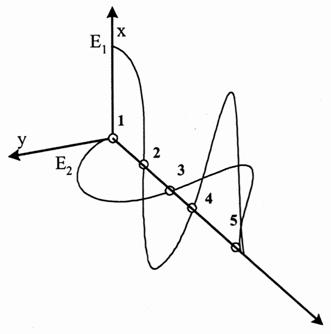
Rys. 4.18
Schematyczne przedstawienie polaryzacji kołowej fali
elektromagnetycznej [2]
· stopień
spolaryzowania światła:
można go określić za pomocą
następującej zależności:
|
 |
(4.19) |
Jeżeli światło jest w pełni
spolaryzowane, to powyższa zależność (4.19) przyjmuje wartość 1;
· unormowane
(znormalizowane) elementy wektora Stokesa:
unormować wektor, tzn. podzielić
każdą z jego współrzędnych przez jego długość, zatem aby unormować
(znormalizować) współrzędne wektora Stokesa wystarczy podzielić je
przez
S0,
otrzymamy wtedy:
 , ,
 , ,
 ,
a wektor Stokesa przyjmuje postać: ,
a wektor Stokesa przyjmuje postać:
 i
nazywa się
unormowanym wektorem Stokesa względem
S0.
Należy dodać, że unormowane elementy wektora Stokesa przyjmują
wartości z przedziału domkniętego od –1 do +1.
Wynika to z faktu, że współrzędna
S0
reprezentuje największa moc, pozostałe współrzędne mogą przyjąć
jedynie wartości mniejsze bądź równe. Zatem np. jeśli mamy do
czynienia z falą świetlną spolaryzowaną liniowo o drganiach w
kierunku poziomym, to unormowane elementy wektora Stokesa przyjmą
wartości: i
nazywa się
unormowanym wektorem Stokesa względem
S0.
Należy dodać, że unormowane elementy wektora Stokesa przyjmują
wartości z przedziału domkniętego od –1 do +1.
Wynika to z faktu, że współrzędna
S0
reprezentuje największa moc, pozostałe współrzędne mogą przyjąć
jedynie wartości mniejsze bądź równe. Zatem np. jeśli mamy do
czynienia z falą świetlną spolaryzowaną liniowo o drganiach w
kierunku poziomym, to unormowane elementy wektora Stokesa przyjmą
wartości:
 , ,
 , ,
 . .
Jak
wspominano na początku tego paragrafu, sfera
Poincarégo jest tworzona na bazie
składowych wektora Stokesa, a mówiąc ściślej, na podstawie
unormowanego wektora Stokesa względem
S0.
Na Rys. 4.19 zaznaczono
punkty charakterystyczne dla polaryzacji liniowej o drganiach
poziomych i pionowych, polaryzacji liniowej o drganiach skośnych
(skręcanie płaszczyzny pod kątem –45o albo +45o)
oraz polaryzacji kołowej lewoskrętnej i prawoskrętnej. W taki sam
sposób można zaznaczyć każdy stan polaryzacji – każdy punkt na
sferze reprezentuje wektor charakterystyczny dla odpowiedniej
polaryzacji.
Sferę
Poincarégo cechują następujące wielkości i własności:
· stopień
spolaryzowania fali świetlnej:
jest to odległość punktu na sferze
od początku układu współrzędnych, czyli inaczej jest to długość
wektora Stokesa. Odległość ta może się zmieniać od zera – dla
światła niespolaryzowanego, do długości równej promieniowi sfery –
dla światła całkowicie spolaryzowanego;
· każdej polaryzacji
liniowej odpowiadają punkty na równiku;
· stany polaryzacji
eliptycznej leżą na sferze powyżej i poniżej równika (polaryzacja
prawoskrętna na półkuli północnej sfery a polaryzacja lewoskrętna na
półkuli południowej sfery);
· polaryzacji kołowej
odpowiadają punkty na biegunach sfery;
· polaryzacjom
ortogonalnym (wzajemnie prostopadłym) odpowiadają punkty w
przeciwległych końcach średnicy sfery, tzn. takie, których odległość
jest równa podwojonemu promieniowi sfery;
· ze względu na fakt, że
stany polaryzacji są reprezentowane na sferze
Poincarégo jako pojedyncze punkty,
to zmiany polaryzacji zaznaczane są jako linie ciągłe łączące
odpowiednie punkty, linie te nazywamy trajektoriami.
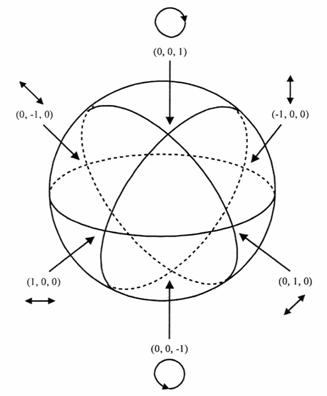
Rys. 4.19 Sfera
Poincarégo z
naniesionymi współrzędnymi unormowanego wektora Stokesa
dla charakterystycznych punktów polaryzacji liniowej
Zasada
pomiaru współczynnika PMD w oparciu o sferę Poincarégo oparta jest
na fakcie, że wraz ze zmianą częstotliwości fali świetlnej
wprowadzanej
do badanego światłowodu zmienia się stan polaryzacji fali świetlnej
na jego wyjściu. Zatem zmieniają się współrzędne (parametry)
unormowanego wektora Stokesa, które przedstawiają stan polaryzacji
na sferze Poincarégo. Metoda pomiarowa polega na:
· wprowadzeniu do
badanego światłowodu fali świetlnej, którego polaryzacja jest
kontrolowana przez kontroler polaryzacji. Najlepiej pomiary
wykonywać dla kilku długości fali;
· dokonaniu pomiaru
polaryzacji fali świetlnej na wyjściu badanego światłowodu, dla tych
długości fali, które były wprowadzane do badanego włókna;
· wyznaczeniu zmiany
różnicowego opóźnienia grupowego spowodowanej zmiana długości fali
światła na podstawie następującej równości:
|
 |
(4.20) |
gdzie:
dΦ
– zmiana kąta wektora Stokesa na sferze Poincarégo (Rys. 4.21),
dλ
– zmiana długości fali,
λ1
i
λn
– początkowa i końcowa wartość długości fali z przedziału
dλ
= <λ1,
λn>;
· obliczeniu współczynnika (parametru) dyspersji
polaryzacyjnej wyznaczamy w oparciu o równość (2.38) z Rozdziału II
(Paragraf 2.2.2) podstawiając
w miejsce wartość
 wyznaczoną
na podstawie równania (4.20). wyznaczoną
na podstawie równania (4.20).
W
oparciu o uzyskane wyniki pomiarowe można prześledzić jak zmieniała
się polaryzacja światła. Dokonuje się tego poprzez śledzenie
trajektoriów przemieszczeń punktów odpowiadających wektorom Stokesa
na sferze Poincarégo.
W celu
zapewnienia odpowiedniej dokładności pomiaru współczynnika PMD
należy dobierać przedział
dλ
zgodnie z nierównością (4.18). Zapewni to dodatkowo, że obrót
wektora stanu polaryzacji pomiędzy dwoma punktami pomiaru będzie
mniejszy od 180o .
Rys. 4.20
Schemat aparatury do
pomiaru dyspersji polaryzacyjnej
w metodą wykorzystującą sferę
Poincarégo
Źródło światła, które
jest używane przy pomiarze, powinno być wąskopasmowe i przestrajalne
(przestrajalny laser), jeżeli nie dysponujemy takim źródłem możemy
wykorzystać kilka różnych, ale musimy zadbać o podobne warunki
sprzężenia światłowodu ze źródłem.
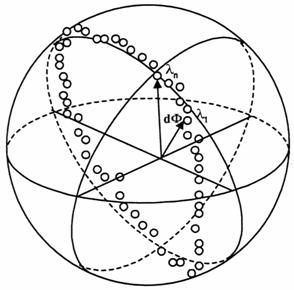
Rys. 4.21 Przykład pomiaru
dyspersji polaryzacyjnej w metodzie
wykorzystującej sferę Poincarégo
Metoda
wykorzystująca powstawanie przesunięcia fazy sygnału wyjściowego
względem zmodulowanego sygnału wejściowego
Metoda
ta oparta jest na fakcie, że pod wpływem medium transmisyjnego,
jakim jest światłowód, sygnał zmodulowany podany na jego wejście ma
inną fazę niż sygnał odebrany na wyjściu tegoż włókna. Fakt ten był
już wspominany przy analizie metod pomiaru parametru dyspersji
chromatycznej.
Rys.
4.22
Schemat aparatury do pomiaru dyspersji polaryzacyjnej za pomocą
metody wykorzystującej
powstawanie
przesunięcia fazy sygnału wyjściowego względem zmodulowanego
sygnału wejściowego
Źródło światła,
którym jest laser, emituje zmodulowaną amplitudowo falę świetlną,
która jest transmitowana przez badany światłowód. Następnie sygnał
optyczny z wyjścia badanego światłowodu podawany jest do
fotoodbiornika.
Po odebraniu sygnału optycznego dokonywany jest pomiar jego fazy
oraz jej porównanie z fazą sygnału odniesienia, którym może być
sygnał modulujący laser (najczęściej sygnał sinusoidalnie zmienny)
albo sygnał pochodzący bezpośrednio z lasera. Proces porównania
odbywa się w komparatorze fazy (widzimy na Rys. 4.22 trzy sygnały
doprowadzone do komparatora fazy, zawsze przy porównywaniu wybieramy
odpowiednią parę: sygnał odebrany i sygnał modulujący albo sygnał
odebrany i sygnał z lasera). Jeżeli nie dysponujemy
komparatorem fazy to możemy go zastąpić miernikiem fazy i
samodzielnie wyznaczyć interesujące nas przesunięcie fazy pomiędzy
sygnałami. Należy również pamiętać, aby polaryzacja światła na
wejściu badanego światłowodu była zmieniana.
Różnicowe opóźnienie
grupowe jest określone w podobny sposób, jak
w równości (4.7) jednak w tym przypadku pomiar wykonywany jest dla
jednej długości fali, zatem nie określamy różnicy faz dla dwóch
długości fali, tylko różnicę maksymalnego i minimalnego przesunięcia
pomiędzy fazami.
Dokładność omawianej metody rośnie wraz
z długością czasu wykonywania pomiaru, tzn. wraz ze wzrostem liczby
sprawdzonych (rozpatrzonych) stanów polaryzacji zmodulowanego
światła laserowego na wejściu badanego włókna.
Metoda
oparta na analizie opóźnienia propagacji impulsu
Założeniem, jakie musi być poczynione przed rozpoczęciem omawiania
niniejszej metody jest, że wykorzystywane w czasie pomiarów impulsy
światła muszą być krótkie (tzn. wyznaczamy opóźnienie w czasie
propagacji impulsów krótkich przez badany światłowód).
Ramy
czasu trwania impulsu pomiarowego (sondującego) są następujące: od
ułamka pikosekundy do kilku bądź kilkudziesięciu pikosekund.
W
czasie wprowadzania (wstrzykiwania) impulsów świetlnych do włókna
należy również zmieniać polaryzację światła naprzemiennie do osi
„wolnej” – pionowej i „szybkiej” – poziomej światłowodu. Następnie
mierzy się czas przejścia impulsów przez badane włókno
światłowodowe. Różnica w czasach przejścia impulsów niesie
informacje o wartości różnicowego opóźnienia grupowego.
Z oscyloskopu – urządzenia pracującego w dziedzinie czasu można
odczytać owe różnicowe przesunięcie grupowe, które można opisać
równaniem:
Rys. 4.23
Schemat
aparatury do pomiaru dyspersji polaryzacyjnej za pomocą metody
opartej na
analizie czasu opóźnienia impulsu
Metoda
interferometryczna
Polega ona na analizie
funkcji autokorelacji pola elektromagnetycznego
na końcu badanego światłowodu w czasie wprowadzania (wstrzykiwania)
do niego impulsów świetlnych pochodzących z szerokopasmowego
źródła światła jakim jest dioda elektroluminescencyjna LED,
albo lampa halogenowa, która emituje białe światło.
Metoda ta jest
przeznaczona do pomiarów różnicowego opóźnienia grupowego w
zakresie od 0,1 ps do 100 ps przy zakresie długości fali z
przedziału od 60 nm do 80 nm.
Możliwych jest kilka rodzajów układu pomiarowego wykorzystywanych w
tej metodzie, jednak najczęściej wykorzystuje się interferometr
Michelsona albo interferometr Macha – Zehndera.
Obecnie najbardziej znanym i precyzyjnym urządzeniem do pomiaru
odległości jest interferometr. Wykorzystuje on efekt interferencji
światła
do mierzenia odległości z dokładnością do pojedynczej długości fali.
Promień odniesienia oraz
promień pomiarowy przebiegają różne drogi w przestrzeni. Jedna
wiązka porusza się po drodze o znanej długości, druga po drodze
mierzonej. Obydwa promienie podlegają interferencji, zaś odczytanie
rozkładu prążków interferencyjnych pozwala określić różnicę długości
w przebiegu promieni.
W praktyce tak dokonany pomiar pokazuje różnice dróg optycznych, na
którą składa się nie tylko różnica geometryczna długości dróg, ale
także zależność
od własności optycznych ośrodka, przez który przebiegają promienie,
co znajduje swoje zastosowanie np. podczas pomiaru naprężeń ośrodka.
Rys.
4.24 Schemat
interferometru Michelsona
Interferometr
Michelsona (Rys. 4.24) posiada dwa prostopadłe do siebie ramiona.
Światło ze źródła S wpada do wnętrza układu i w centralnej części
rozdziela się na dwie wiązki na półprzepuszczalnym zwierciadle P. Na
końcu obu ramion znajdują się zwierciadła Z1 i Z2
które zawracają bieg promieni. Zwierciadło Z2 dodatkowo
jest ruchome i za jego pomocą zmienia się drogę optyczną jednej
z wiązek. Po odbiciu dwie wiązki padają ponownie na
półprzepuszczalne zwierciadło gdzie biegną już w jednym kierunku (do
obserwatora O) i interferują
ze sobą. Interferometr
Michelsona należy do grupy
interferometrów dwuwiązkowych.
W interferometrze
Macha – Zehndera promień świetlny wychodzący
ze źródła światła S rozdzielany jest na dwa promienie (stosunek mocy
obu promieni 50% – 50%) z wykorzystaniem zwierciadeł (płytek)
półprzepuszczalnych P1 i P2. W jednym z ramion
interferometru wywołuje się zmianę współczynnika załamania światła
za pomocą siatki dyfrakcyjnej A – to ramię nazywane jest sygnałowym,
natomiast drugie nazywane jest ramieniem sygnału odniesienia. Obraz
interferencyjny oglądany na ekranie, otrzymany dzięki zwierciadłom Z1
i Z2, zależy od różnicy faz obu promieni. Różnica faz
wywołana jest różnicą dróg optycznych promieni z powodu różnych
wartości współczynnika załamania światła. Interferometr Macha –
Zehndera należy do grupy interferometrów dwuwiązkowych.
Rys.
4.25
Schemat interferometru Macha
–
Zehndera
W
tej części tego paragrafu będę chciał omówić zasadę pomiaru
współczynnika PMD w oparciu o pomiar różnicowego opóźnienia
grupowego
z wykorzystaniem interferometru Michelsona. Ogólnie rzecz biorąc
metoda ta sprowadza się do analizy poziomu mocy optycznej w
zależności od położenia zwierciadła ruchomego.
W wyniku pomiaru interferometrem
otrzymujemy tzw. krzywą autokorelacji (charakterystykę funkcji
autokorelacji), na podstawie której można wyznaczyć różnicowe
opóźnienie grupowe.
Krzywa autokorelacji uzyskana w
czasie pomiaru interferometrem, gdy badany światłowód wykazuje słabe
sprzężenie międzymodowe, posiada pewne charakterystyczne
elementy:
· pik środkowy: powstaje on wtedy, gdy
długości ramion interferometru są jednakowe;
· piki boczne: pojawiają się wtedy, gdy w
wyniku przesunięcia zwierciadła ruchomego wprowadzone
zostanie opóźnienie równe różnicowemu opóźnieniu grupowemu.
Na podstawie charakterystyki funkcji autokorelacji
– przebiegu zmiany mocy w funkcji czasu, można określić różnicowe opóźnienie
grupowe. W tak prosty sposób, jak dla światłowodu ze słabym sprzężeniem modowym,
gdzie mody bardzo słabo interferują w siebie o charakterystyce autokorelacji,
nie uda się nam wyznaczyć różnicowego opóźnienia grupowego dla światłowodu, w
którym występuje silne sprzężenie międzymodowe – silna interferencja modów w
siebie.,W takim przypadku
uzyskaną charakterystykę funkcji autokorelacji należy w pewien sposób aproksymować, tzn. nadać jej
pewną obwiednię, którą najczęściej jest krzywa Gaussa (krzywa
dzwonowa).
Wówczas istnieje możliwość analitycznego wyznaczenia
różnicowego opóźnienia grupowego w sposób statystyczny, kiedy
określimy sobie zmienną losową
X(t), która opisuje krzywą aproksymującą
w funkcji czasu i wyznaczymy parametry charakterystyczne dla tej
zmiennej losowej, tj
σX(t)
oraz μX(t). |